服务热线
010-58895540
010-58895541
010-58895542
010-58895543
关于这款机器人,有几点需要特别注意:
新版本Atlas高5.9英尺(1.75 m ),重180磅(82 kg ),比前一代高6.2英尺(1.9m)重345磅(156kg)的型号更短更轻。Atlas为户外和室内应用设计。它是电力驱动和液压制动的。它的身体和腿中使用了传感器来保持平衡,传感器位于其四肢以防侧翻,有些传感器甚至能够识别箱子或门上类似QR的编码。还在头部使用了激光雷达和立体传感器以避开障碍物、评估地形和帮助导航。

Atlas是绑了一个外部电源来供电的,而这一版本则是电池供电,更时尚、更安静、更灵活,所以比起上一个版本,新Atlas看起来看轻盈,走起路来健步如飞。
看起来波士顿动力认为电机还无力驱动180磅机器人完成行走的任务,所以他们继续使用了更为复杂(通常也更混乱)的液压系统。其它有足机器人也同样这么做,看起来这似乎是在电力的高效和液压的高功率之前作出的妥协。其动态平衡让我们想起了早期的BigDog,但Atlas是依靠双足行走的,这实在太强了,因为其肢体在保证移动速度的同时还需要支持上身。
我们目前还不清楚目前这款机器人的自动化程度有多高。在户外行走时,其激光雷达看起来并没有太多旋转,这意味着很有可能有人在遥控它。一些搬盒子的过程看起来是自动的,但我们肯定要关注在该机器人将盒子码在架子上时背后发生着什么。
Atlas双足机器人在自主平衡方面取得了巨大进步
尤其值得注意的是其在自主平衡上取得的进步。Atlas是双足人形机器人,其运动稳定性一直是学术界研究的难题。在去年DARPA机器人挑战赛这样的***赛事里,参赛团队的机器人面临的***难题是让自己保持直立,那些世界***的实验室做出的双足机器人步态在平地上仍是小心翼翼,而且还经常摔,当然,也不能自己站起来。看一下这些机器人摔倒的视频,你就能想象出让机器人平衡站立和正常行走是多么困难的事情。
这些摔倒视频看起来令人捧腹,但对于这些价值百万美元的机器人来说,由于平衡能力不足导致的摔倒动作可能会带来毁灭性的打击——仪器、电机和其他部件造成了严重损坏。因此,如何增加机器人的平衡能力,成为所有机器人公司所面临的*严峻的问题。
从本次波士顿公司发布的视频来看,他们很好的解决了这个问题,波士顿动力公司对此没有进行详细说明,但从公司创始人 Marc Raibert 在2015年8月份的FAB 11大会演讲中可以看出一些端倪。他在现场展示了一段视频,那时的 Atlas已经能够做到了在树林中快速行走。
与那个在几个月前 DARPA 机器人挑战赛中行走缓慢、摔的很惨的 Atlas 判若两人。Raibert 说,关键在于他们的机器人可以通过快速移动、选择新的落脚点来实现动态平衡。
关于波士顿动力和逆天Atlas拟人机器人,这里有你想知道的一切。
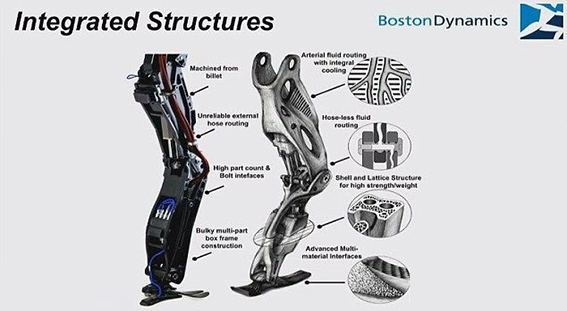
在左边是Atlas腿的一个版本。右边则是波士顿动力“未来的愿景”:这只脚将采用3D 打印,将所有的液压元件直接打印到其结构中。这只脚看上去有很多仿生的元素,比如“类动脉式的液压管道布局”、看上去很像骨头的支架等。我们并没有看到这条腿的实物图片,但听上去波士顿动力已经造出来了一个。Marc Raibert信心满满的说:「我现在还不能给你们展示机器人,但我们在很努力地推进这个项目,并且我认为到年底你们将看到使用类似这种技术制作的波士顿动力机器人。」虽然推迟了几个月,但Atlas还是做到了。
除了Atlas,也有一些机器人团队很好的解决了机器人平衡的问题。在2015 DARPA 机器人挑战赛中,许多参赛团队的机器人使用了Atlas,他们通过安装他们自己的软件并修改来让机器人保持平衡。来自WPI-CMU的阿特拉斯机器人Warner是诸多Atlas中***一个没有摔倒或需要重启的机器人。在决赛的两次尝试中,他们都成功走到***,拿下八分中的七分。这样优异表现的背后,是CMU机器人学院Christopher Atkeson教授组对稳定步态的研究成果,尤其是组里博士生冯思远的工作,冯思远在3D行走方面的论文曾在13年的仿人机器人国际会议Humanoids上获得过大会***论文(Best Paper)的荣誉。
Atlas展示了双足机器人***的平衡能力,但总有一些极端情况会让它失去平衡,如何应对?那就让它们优雅的摔倒。伍斯特理工学院的Matt DeDonato指出:「大多数的(机器人挑战赛)参与者,都会关注机器人保持直立而不是关注找出更好的摔倒方式,尤其是当每次摔倒,都会有大量的时间惩罚」。在与卡内基梅隆大学合作中,为了减小损坏,当检测到摔倒时,Matt DeDonato的队伍操控的阿特拉斯机器人都会关掉自身的执行器,然后跛行前进。在整个DAPRA挑战中,DeDonato的队伍保持着机器人始终站立。但是DeDonato指出:「随着机器人的商业化,需要研究这个领域,毕竟机器人总会有摔倒的时候」。
对此,波士顿动力创始人Marc Raibert指出:「当他的队伍开发一个四足机器人BigDog时,就开始思考怎样保护一个即将摔落的机器人。*初的想法是当检测摔倒时,让机器人的四肢失灵」。他说:「当四肢碰到地面时,四肢如同长的杠杆,力量会直接作用在连接处。我们的确摔坏过BigDog的一些腿,所以我们重新对BigDog编程。当出现摔倒时,就松动它四肢的连接处。我们现在做的机器人都会检测当他们失去平衡时,对应做出什么反应。」
佐治亚理工学院研究者们从人类摔倒的行为中总结出一种算法,让一个不平衡的机器人找出怎样扭曲它的身体,使得它能减小与地面的碰撞力。为了驱散摔倒的动力,这种算法会计算出机器人摔倒与地面产生的一系列接触点。他们用一个小的人形机器人BioloidGP来测试算法,用Atlas来模拟实战。研究成员Karen Liu表示,还会基于人类的条件反射给机器人建立一套类似的神经系统
